Este robot consta de unas ruedas mecanum como base de diseño. Además llevará un sensor de distancia y otros dos sensore s de proximidad para poder llevar a cabo todas las pruebas propuestas, junto con dos baterías de 9 v, 4 motores de servo 360 y Display 16*8. Estará impreso en 3D y se podrá usar mediante Bluetooth.
s de proximidad para poder llevar a cabo todas las pruebas propuestas, junto con dos baterías de 9 v, 4 motores de servo 360 y Display 16*8. Estará impreso en 3D y se podrá usar mediante Bluetooth.
La prueba que realizara constará de un laberinto diseñado con trozos de cartón que servirán de paredes, para poder montarlo contendrá unas piezas que servirán como puente de unión diseñadas en 3D.
El objetivo principal del robot será salir de forma autónoma desde el inicio del laberinto. Para hacerlo, usará los sensores que detectarán los huecos de pared libre y así, dirigirse hacia ellos, hasta llegar a la salida. Se tendrá que hacer en el tiempo mínimo posible.
Los materiales que usaremos serán los siguientes:
Un shield nano, donde pondremos el arduino nano para introducir hacer funcionar el código que será introducido en el arduino nano. De esta forma será más fácil de conectar.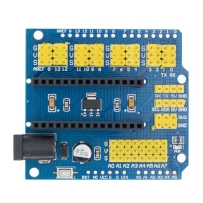
Un arduino nano donde pondremos el código que programaremos.

4 servo motores SG90 de 360º

Sensor de distancia HC-SR04

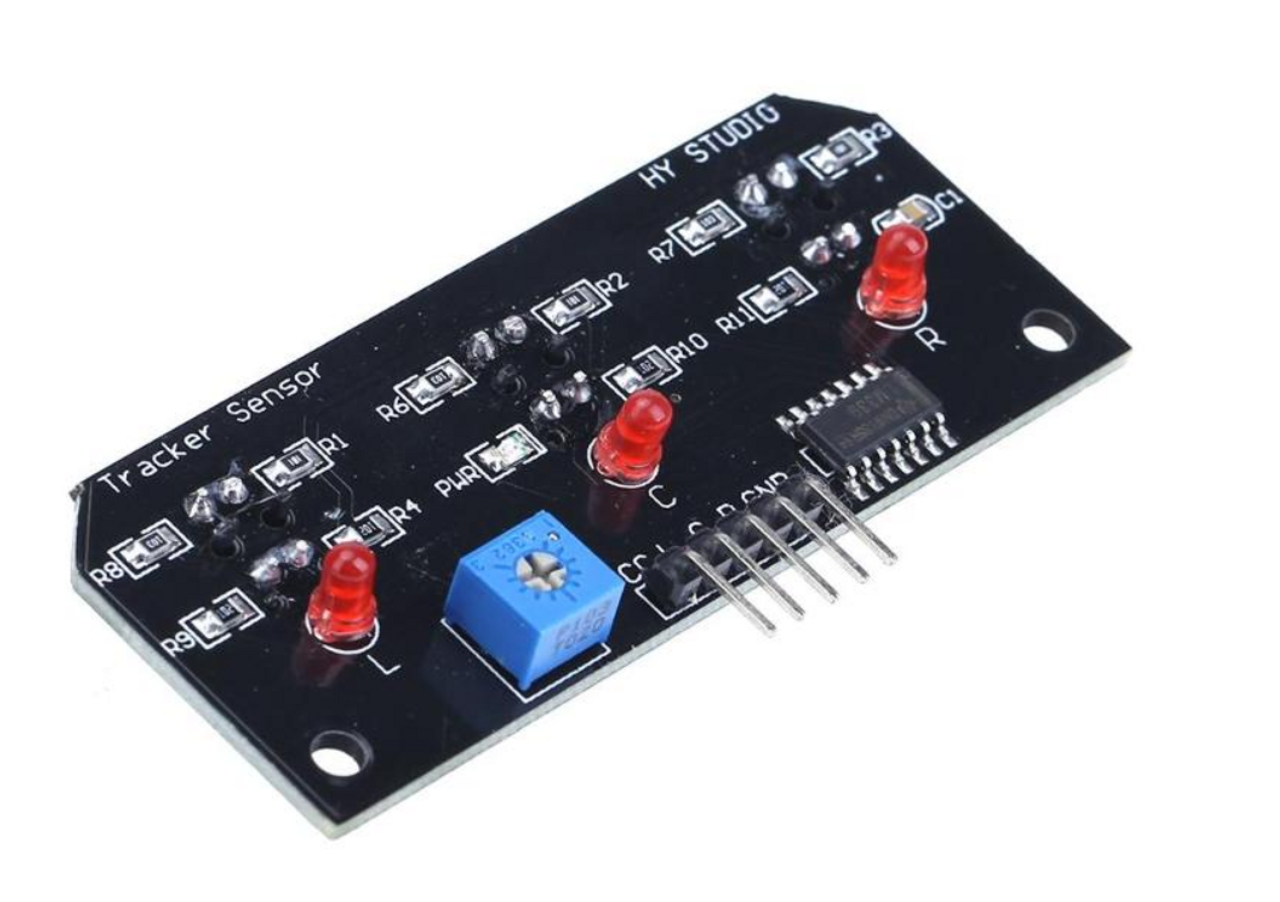
Módulo de sensor (sigue líneas)
2 sensores de proximidad

Un display de 16×8 leds.

Un módulo BlueTooth HC-06.

4 ruedas mecanum 48 mm.

cables DuPont.

2 conectores para batería de 9 V.

Dos baterías de 9 v.

Un interruptor.

