Objetivos
-
- Sensor ultrasónico de distancia.
- Medir el tiempo, el método delayMicroseconds().
- Más funciones disponibles: pulseIn().
Material requerido.
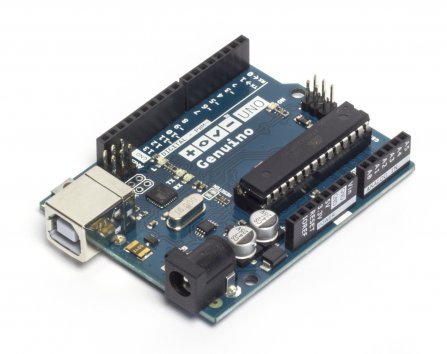 |
Arduino Uno o similar. |
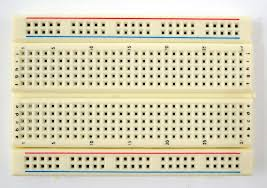 |
Una Protoboard. |
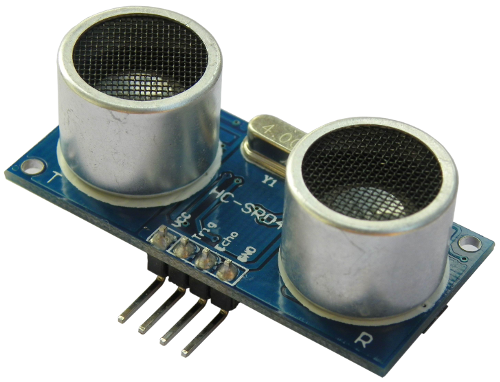 |
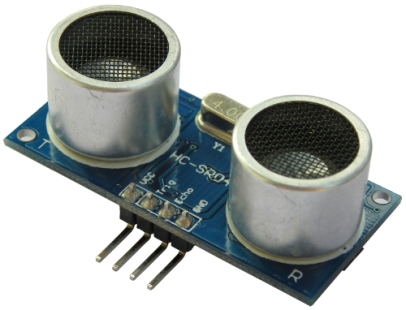
Sensor de distancia HC-SR04 |
 |
Un diodo LED |
 |
Una resistencia de 330 Ω |
 |
Cables |
Como funciona un sensor de distancia
La ecolocación o ecolocalización, a veces también llamada biosonar, es la capacidad de algunos animales de conocer su entorno por medio de la emisión de sonidos y la interpretación del eco que los objetos a su alrededor producen debido a ellos.
Lo que haremos será utilizar un sensor de distancia sencillo HC-SR04, que nos permite enviar estos pulsos ultrasónicos y escuchar el eco de retorno. Midiendo este tiempo, podemos calcular la distancia hasta el obstáculo.
- El oído humano no percibe sonidos por encima de 20kHz. Por eso, a las ondas de mayor frecuencia las llamamos ultrasonidos ( mas allá del sonido). Los sensores de ultrasonidos funcionan sobre los 40 kHz.
- No son perfectos, les influye la temperatura ambiente, la humedad y los materiales en los que reflejan, lo que genera una cierta incertidumbre. Pero a cambio son baratos y efectivos hasta un poco más de 3 metros en condiciones normales si la precisión no es un problema determinante
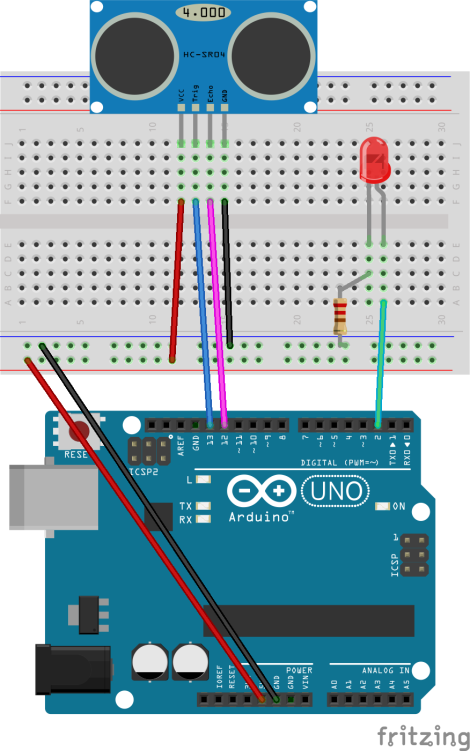
El esquema.
Veamos como conectar uno de esto detectores a nuestros Arduinos. Pondremos un led rojo para encenderlo en caso de detección:
El Programa
Vamos con el programa, empezamos definiendo algunos valores:
#define trigPin 13 #define echoPin 12 #define led 2
Hasta ahora habíamos visto que podíamos definir una variable como int, por ejemplo, y también como una constante (const int pin). Vamos a probar otro método, el #define que es una directiva para el compilador.
Esto solo significa que el compilador cambiará todas las ocurrencias (apariciones) de estos #define en nuestro programa por su valor, antes de compilar. Esta es la forma clásica de C de hacer esto y tiene la virtud de que no ocupa memoria definiendo una variable .
void setup()
{
Serial.begin(9600);
pinMode(trigPin,OUTPUT);
pinMode(echoPin,INPUT);
pinMode(led,OUTPUT);
}
Tenemos otra función delayMicroseconds(µs) que simplemente congela Arduino el número especificado de microsegundos.
Para dar un pulso ultrasónico lo que hacemos es activar el pin Trigger durante unos microsegundos y para ello lo ponemos en HIGH, antes de escuchar el eco:
digitalWrite(trigPin,LOW);//trigger desactivado delayMicroseconds(2); //Para estar seguros digitalWrite(trigPin,HIGH);//Activamos pulso delayMicroseconds(10); // Esperamos 10µs digitalWrite(trigPin,LOW); // Cortamos el pulso
Para escuchar el pulso vamos a usar otra función pulseIn().
Básicamente lo que hace es escuchar el pin que le pasamos, buscando una señal que pase de LOW a HIGH ( si le pasamos HIGH como parámetro) y cuenta el tiempo que tarda en volver a bajar desde que sube.
long duracion, distancia ; duracion = pulseIn(echoPin,HIGH);
Ahora ya sabemos el tiempo que tarda en volver el eco en µs. Como la velocidad del sonido es de 343 metros/segundo, necesitamos 1/343 = 0,00291 segundos para recorrer un metro.
Para usar una medida más cómoda podemos pasar esto a microsegundos por centímetro: 29.1 µs/cm.
El factor de conversión será la mitad (ir y volver) de: 1/29.1 = 0.017
El programa
#define trigPin 13
#define echoPin 12
#define led 2
void setup(){
Serial.begin (9600);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
pinMode(led, OUTPUT);
}
void loop(){
int limite=200;
long duracion, distancia ;
digitalWrite(trigPin, LOW); // trigger desactivado
delayMicroseconds(2);
digitalWrite(trigPin, HIGH); // Activamos el pulso
delayMicroseconds(10); // Esperamos 10µs.
digitalWrite(trigPin, LOW); // Cortamos el pulso
duracion = pulseIn(echoPin, HIGH) ;
distancia = duracion * 0.017 ;
Serial.println(String(distancia) + » cm.») ;
if ( distancia < limite)
digitalWrite ( led , HIGH) ;
else
digitalWrite( led , LOW) ;
delay (500) ; // Para limitar el número de mediciones
}
Para convertir esto en un detector de movimiento se ha creado una variable un poco menor de la medida que el sensor recibe en vacío (en este caso unos 200 cm). Si la distancia medida cae por debajo de este valor es que algo se ha interpuesto y por tanto encendemos una alarma, en nuestro caso un LED.
