Autor: Gala García Pérez
Año: 2022-2023
Proyecto:
En este proyecto voy ha hacer un robot otto para luchar en una competición de sumo. Las reglas para la competición son:
·Los robots se pondrán en marcas previamente puestas en el tatami.
·Quien logre tumbar o sacar del tatami a su contrincante gana.
·En esta competición se puede añadir modificaciones a los robots para tirar o empujar a su adversario mas fácilmente.
·Todos tienen que separarse del tatami al menos un metro.
·En caso de no poder tumbar o sacar al contrincante, servira con hacer que toquen la linea negra del tatami.
·Todos los robots serán puestos en la misma posición.
Material necesario:
Para poder montar el robot voy a necesitar
·2 servos de 360º y 4 servos de 180º (micro servo 9g).

·Un arduino nano y un shield nano.
·1 pila de 9V

· Dispositivo bluetooth

Diseño Fisico
Para diseñar la forma del robot hemos utilizado la aplicación tinker cad.
Este es el link a mi diseño de la cabeza:
https://www.tinkercad.com/things/5QvyFIIeo7R
este para el diseño completo:
https://www.tinkercad.com/things/2BOPBBqCQ1c
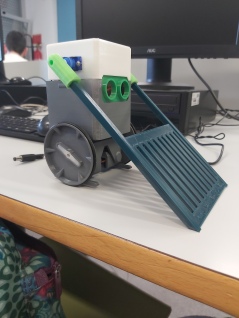
aquí una foto de como queda:
La Programación
La programación la hemos hecho en Arduino IDE.
La programación que ha hecho para el robot es esta:
#include <Servo.h>
#include <SoftwareSerial.h>
SoftwareSerial bt1 (10,11);
Servo piz;
Servo paiz;
Servo pide;
Servo pade;
Servo briz;
Servo bred;
char val;
void setup() {
bt1.begin(9600);
Serial.begin(9600);
piz.attach(2);
paiz.attach(4);
pide.attach(3);
pade.attach(5);
briz.attach(6);
bred.attach(7);
}
void loop() {
if (bt1.available()) {
val=bt1.read();
Serial.println(«me ha llegado el valor:»);
Serial.println(val);
if(val==’3′) {
der();
}
if(val==’4′) {
iz();
}
if(val==’5′) {
para();
}
if(val==’1′) {
ade();
}
if(val==’2′) {
atr();
}
if(val==’6′) {
pup();
}
if(val==’7′) {
pdown();
}
if(val==’A’) {
up();
}
if(val==’B’) {
down();
}
}
}
void atr() {
pade.write(130);
paiz.write(30);
delay(1000);
}
void ade() {
pade.write(30);
paiz.write(130);
delay(1000);
}
void up() {
piz.write(165);
pide.write(14);
delay(1000);
}
void down() {
pide.write(90);
piz.write(80);
delay(1000);
}
void para() {
paiz.write(90);
pade.write(90);
delay(1000);
}
void iz() {
paiz.write(100);
pade.write(50);
delay(1000);
}
void der() {
paiz.write(130);
pade.write(80);
delay(1000);
}
void pup() {
bred.write(110);
briz.write(100);
}
void pdown() {
bred.write(67);
briz.write(131);
}
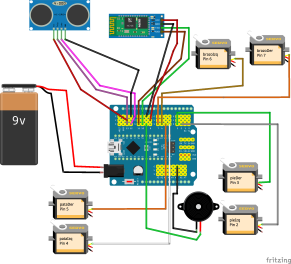
El Cableado
El esquema de las conexiones y cableado es este: