Objetivos
- Montar un pequeño motor paso a paso 28BYJ-48 con su adaptador.
- Escribir un primer programa de control muy sencillo.
Material requerido
 |
|
 |
|
 |
|
 |
|
Motor paso a paso
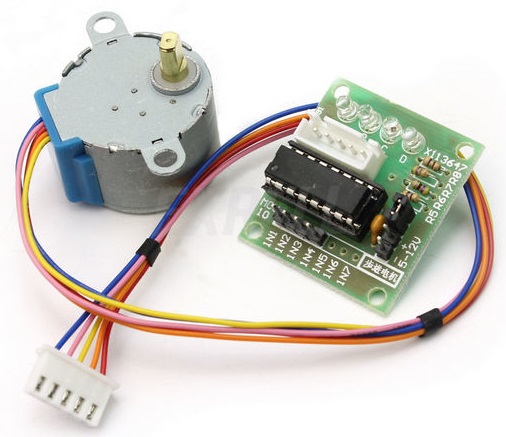
Vamos a usar un pequeño motor paso a paso unipolar, muy común en el mundo Arduino por su pequeño tamaño y bajo coste, el 28BYJ-48 y el adaptador que suele venir con él, basado en el chip ULN2003A.
Veremos en primer lugar las características que presenta y después montaremos un pequeño circuito básico, para mover el motor.
Es un motor unipolar con las siguientes características:
- Tensión nominal de entre 5V y 12 V.
- 4 Fases.
- Resistencia 50 Ω.
- Par motor de 34 Newton / metro más o menos 0,34 Kg por cm.
- Consumo de unos 55 mA.
- 8 pasos por vuelta.
- Reductora de 1 / 64.
Es decir, que como es de 4 pasos (Steps), u 8 medios pasos (O half Steps) por vuelta y usa una reductora de 1 /64, necesitamos dar 8 * 64 = 512 impulsos para completar un giro completo a medios pasos.
- Hay 4 bobinas, si las excitamos de una en una tenemos 4 pasos x 64=256 pasos por vuelta. Pero también podemos excitar la bobina mediante medios pasos, que es el ejemplo que vamos a hacer y por eso a medios pasos una vuelta son 8 * 64 = 512 impulsos
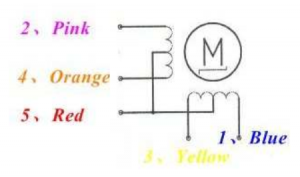
Este es su diagrama de conexión de bobinas, y además marca los colores del cable en función de su conexión interna.
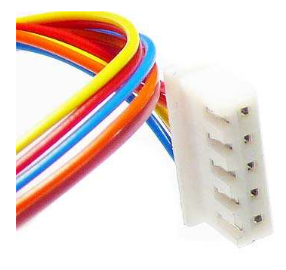
El motor presenta un conector al extremo en el que podemos pinchar cables de protoboard si hay que moverlo directamente, o bien para conectarlo a su adaptador.
Fijaros que su consumo es muy bajo, de unos 55 mA, dentro del rango que nuestro USB proporciona a Arduino (Siempre que no intentemos alimentarlo con un pin) y lo alimentaremos mediante la breakboard típica que le acompaña, que suele usar un integrado del tipo ULN2003A que es un array de transistores Darlington, que soporta hasta 500 mA y que ya dispone de un conector para el motor y de unos pines (IN1 – IN4) para conectar a nuestro Arduino.
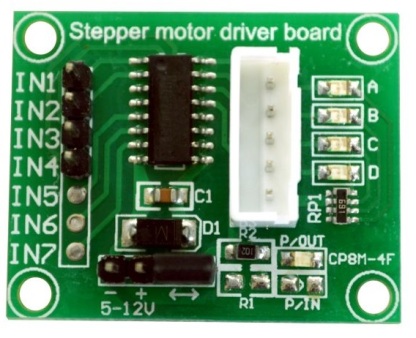
El módulo cuenta con todos los componentes necesarios para funcionar sin necesidad de elementos adicionales, entre ellos diodos de protección y un regulador LM7805 que suministra 5V a la parte lógica del integrado L298N. Cuenta con jumpers de selección para habilitar cada una de las salidas del módulo (A y B). La salida A esta conformada por OUT1 y OUT2 y la salida B por OUT3 y OUT4. Los pines de habilitación son ENA y ENB respectivamente.
En la parte inferior se encuentran los pines de control del módulo, marcados como IN1, IN2, IN3 e IN4.
Conectando el motor 28BYJ-48
Pues usando la breakboard es muy sencillo. Conectad el motor primero a su conector, tiene una posición para impedir que lo coloques al revés y después vamos a colocar las 4 fases a nuestro Arduino de modo que podamos excitarlas de forma independiente.
Es importante que entendáis la idea de que vamos a ir excitando cada una de las fases (O varias simultáneamente) en secuencia levantando a HIGH el pin de Arduino correspondiente.
Para conectar vuestro Arduino usad la siguiente tabla:
| ARDUINO | 12 | 11 | 10 | 9 |
|---|---|---|---|---|
| BREAKOUT | IN1 | IN2 | IN3 | IN4 |
Conectad GND y Vcc a los pines correspondientes del adaptador.
El programa de control
Mientras que los motores CC normales, están diseñados para que al alimentarlos giren de forma continua, un motor paso a paso está diseñado para girar un pasito cada vez que alimentas una de las fases.
Por eso nuestro programa tendrá que gestionar la secuencia en la que excitamos las bobinas para que el motor vaya avanzando de forma continua.
En un motor de 4 fases como este que vamos a usar hay tres maneras de hacer esta secuencia como veíamos en la sesión anterior.
Excitando dos bobinas cada vez (Suele ser lo que recomienda el fabricante)
| PASO | BOBINA A | BOBINA B | BOBINA C | BOBINA D |
|---|---|---|---|---|
| 1 | ON | ON | OFF | OFF |
| 2 | OFF | ON | ON | OFF |
| 3 | OFF | OFF | ON | ON |
| 4 | ON | OFF | OFF | ON |
Tendríamos máximo par, buena velocidad y alto consumo.
Excitando solo una bobina cada vez (Se le llama wave drive):
| PASO | BOBINA A | BOBINA B | BOBINA C | BOBINA D |
|---|---|---|---|---|
| 1 | ON | OFF | OFF | OFF |
| 2 | OFF | ON | OFF | OFF |
| 3 | OFF | OFF | ON | OFF |
| 4 | OFF | OFF | OFF | ON |
Que produciría un par menor (Porque solo se activa una bobina en lugar de dos) y consumo bajo.
O podríamos dar medios pasos así:
| PASO | BOBINA A | BOBINA B | BOBINA C | BOBINA D |
|---|---|---|---|---|
| 1 | ON | OFF | OFF | OFF |
| 2 | ON | ON | OFF | OFF |
| 3 | OFF | ON | OFF | OFF |
| 4 | OFF | ON | ON | OFF |
| 5 | OFF | OFF | ON | OFF |
| 6 | OFF | OFF | ON | ON |
| 7 | OFF | OFF | OFF | ON |
| 8 | ON | OFF | OFF | ON |
El movimiento es más suave y lento que con los métodos anteriores, y el consumo y el par es también intermedio.
Vamos a definir unos arrays con estas tablas para secuenciar el movimiento. Por ejemplo en el caso de usar medios pasos el array sería algo así:
int paso [ 8 ][ 4 ] =
{ {1, 0, 0, 0},
{1, 1, 0, 0},
{0, 1, 0, 0},
{0, 1, 1, 0},
{0, 0, 1, 0},
{0, 0, 1, 1},
{0, 0, 0, 1},
{1, 0, 0, 1}
};
Nuestro programa recorrerá el array y alimentara las bobinas de acuerdo a los valores que presenta. Empecemos con algunas definiciones:
#define IN1 12 #define IN2 11 #define IN3 10 #define IN4 9 int steps_left=4095; boolean direction = true; int steps = 0 // Define el paso actual
Los defines indican a que pines de nuestro Arduino vamos a conectar cada una de los terminales de las bobinas del motor. Después algunas variables para control y un array que representa la secuencia. El setup es bastante sencillo
void setup()
{
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
}
Ahora vamos a definir una función llamada stepper() que avanza un paso cada vez que la invocamos, en realidad medio paso dada la matriz de excitación y que controle en que punto de la secuencia estamos.
Así, el programa principal quedaría:
void loop() {
while(steps_left>0){
stepper() ; // Avanza un paso
steps_left-- ; // Un paso menos
delay (1) ;
}
delay(300);
direction =! direction; //Invertimos dir
steps_left = 4095;
}
El 28BYJ-48 tiene 64 pasos por vuelta y un reductor interno con una relación de 1/64. En conjunto hacen 4096 pasos por vuelta.
Usamos steps_left para definir el número de pasos que queremos girar, y por eso mientras queden pasos pendientes seguimos en el while, que lo que hace es avanzar un paso, disminuir el número de pasos pendientes y hacer un delay que controla la velocidad de giro.
Cuando acaba el while, hacemos un delay para poder apreciar el final e invertimos el valor de direction para cambiar la dirección de giro. Vamos con el método stepper que parece más complicada:
void stepper() //Avanza un paso
{ digitalWrite( IN1, paso[steps][ 0] );
digitalWrite( IN2, paso[steps][ 1] );
digitalWrite( IN3, paso[steps][ 2] );
digitalWrite( IN4, paso[steps][ 3] );
if(direction)
steps++;
else
steps--;
steps = (steps+8)%8;
}
Usamos la variable steps para saber en cuál de los 8 estados posibles de la matriz estamos y escribimos en las bobinas los valores que corresponden a esa situación.
Para controlar la dirección de giro y el valor de steps:
- si giramos en la dirección digamos positiva, hay que ir incrementando steps para mantener el giro.
- si el giro es contrario hay que ir decrementando para que lea el array al revés.
A medida que vamos incrementando steps, queremos que cuando pase de 7 vuelva a 0 y esto se consigue haciendo
steps = steps % 8
Es decir tomando el modulo (resto) con respecto a 8, pero si lo vamos decrementando, alcanzaremos valores negativos, y el módulo de algo negativo sigue siendo negativo, lo que no nos vale, porque necesitamos que el siguiente valor a 0 sea 7 y no -1.
Esto es lo que conseguimos haciendo:
steps = (steps + 8) % 8 ;
- También podrías hacerlo así:
if (steps>7) steps=0 ; if (steps<0) steps=7 ;
El resultado es un motor girando primero en una dirección y después en la contraria.
